工业机器人是现代制造业中实现自动化、智能化生产的核心设备,其通过预设程序或智能算法完成重复性高、精度要求严苛的任务。在焊接领域,机器人凭借高稳定性、高效率及可适应复杂环境的特点,已成为汽车制造、集装箱生产等行业的标配。本文以垂直多关节型六轴焊接机器人为例,解析其技术原理与实际应用场景。
六轴机械臂是工业机器人的主流构造形式,其六个自由度(三个旋转轴+三个平移轴)的设计使其能够模拟人类手臂的灵活运动,覆盖三维空间内的任意轨迹。以某品牌焊接机器人为例,其重复定位精度达±0.08mm,这一指标直接决定了焊接点的一致性——在汽车车身焊接中,微米级误差可能导致结构强度下降或密封性失效。伺服软件控制方式通过实时反馈调整电机输出,进一步提升了运动轨迹的平滑性,尤其适用于薄板焊接等对热变形敏感的场景。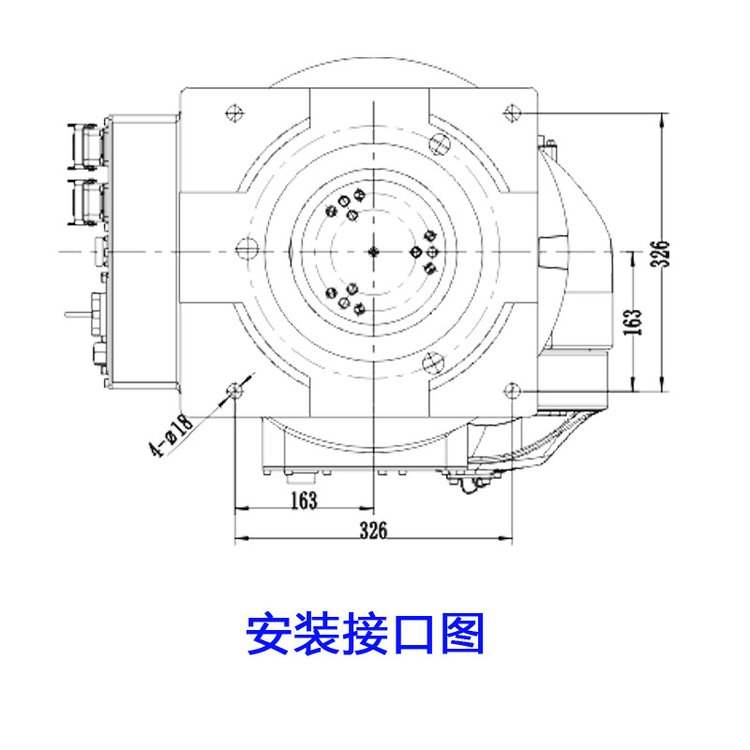
该类机器人的工作范围覆盖机械、汽车、集装箱等流线型焊接工位,其安装方式支持置地式、倒挂式、壁挂式及倾斜安装,可灵活适配不同产线布局。例如,在集装箱侧壁焊接中,倒挂式安装能缩短机械臂与工件的垂直距离,减少空行程时间;而壁挂式安装则适用于空间受限的环形焊缝场景。温度适应性方面,0℃~45℃的工作范围覆盖了大多数室内外工业环境,避免因极端温度导致润滑油凝固或电子元件性能衰减。
从技术趋势看,焊接机器人正从单一功能向智能化、协作化方向发展。部分新型号通过集成视觉传感器与力控技术,可实时识别焊缝位置并调整焊接参数,甚至与人工协同作业。例如,在汽车零部件焊接中,机器人负责重复性高的长直焊缝,人工则处理复杂曲面或需要临时调整的工位,这种模式显著提升了产线柔性。随着制造业对降本增效需求的增长,高精度、易部署的焊接机器人将成为中小企业的转型关键设备。
免责声明:本站内容来源于互联网公开信息,仅供学习和参考使用。如涉及版权问题,请联系我们,我们将在核实后第一时间删除相关内容。